BASIC ROBOT CONTROL
Task: CONTROLLING THE MOTORS
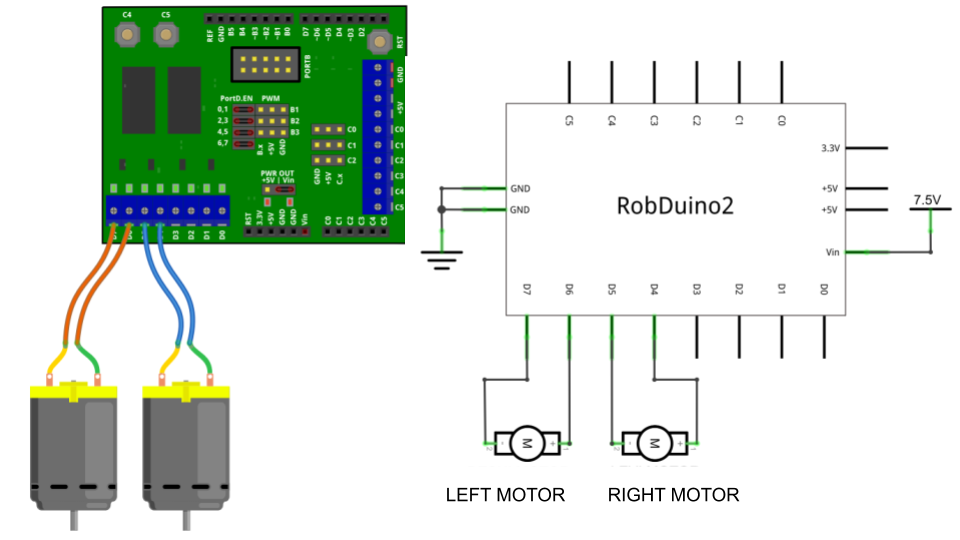
- Connect LEFT MOTOR to digital outputs:
- D7 and D6
- Connect RIGHT MOTOR to digital outputs:
- D5 and D4
 {#fig:DC_motor_connect}
{#fig:DC_motor_connect}
- Now you can write the program to control both motors in order to move the robot FORWARD for 3 second and STOP.
- Next you can write the program which will move the robot in several different directions:
- forward
- backward
- turn left
- turn right
Questions:
- How many digital outputs you have to set in order to control the robot for specific move?
- How many different moves your robot can make?
Summary:
Controlling the robot in two degrees of freedom
To controlling the robot in two degrees of freedom we need to control two motors. Since we have to set two digital outputs for each motor we have to set four digital outputs for each individual move.
Issues:
When I change the direction of the robot the robot does not move as expected.
Probably you did not set all of the outputs correctly. Remember that some outputs may have remained set in previous output state from taken action in previous task.